

Contexte
La maintenance de grandes infrastructures impose de surveiller ses composants de manière évolutive. L'objectif est de considérablement augmenter la réactivité des opérations de maintenance à long terme, avec la possibilité de les intégrer de manière cohérente et anticipée dans un programme de maintenance.
L'utilisation de wagons d'inspection permet d'acquérir une grande quantité de données hétérogènes composées de mesures de capteurs et de métadonnées contextuelles associées. Structurer cette masse de données en mettant en évidence des informations pertinentes est obligatoire pour planifier intelligemment les actes de maintenance. Dans le cas des données d'image acquises par un wagon, il est important de positionner les différents composants de l'infrastructure et d'évaluer leur état.
Notre ambition est de proposer des solutions d'analyse prédictive basées sur l’état de l’art de l’intelligence artificielle pour indexer toutes ces données hétérogènes et effectuer une large gamme de tâches en aval. Nous nous appuyons sur des modèles généralistes de segmentation d’image pour extraire la position relative des différents composants d’intérêts identifiés (poteaux, rails, etc.)
Le système de localisation hybride sur lequel nous travaillons s'appuie sur différentes sources de mesures pour fournir des estimations de localisation robustes. Ce système généraliste et hybride peut être appliqué à une large gamme de composants dans les infrastructures de métro, tramway et chemin de fer tels que les poteaux, les appareils de voies, la caténaire, etc. Il permet notamment de renforcer la précision de la localisation même en cas de mesures manquantes ou bruitées (odomètre et GPS). Ce système contribue donc au suivi des composants de l'infrastructure, depuis l'analyse d'image jusqu'à la mise à jour des données patrimoniales du mainteneur.

La partie innovante de notre solution repose sur le fait qu'il s'agit d'un système ouvert et adaptable. Il peut poursuivre son apprentissage au fil du temps pour s'adapter aux annotations fournies par les utilisateurs. Il est possible pour les utilisateurs d'annoter plusieurs composants spécifiques à partir du flux vidéo provenant de la caméra. Dans cet article, nous montrons sur un exemple (i) comment adapter le système pour se concentrer sur la localisation du berceau du cœur d'un appareil de voie, et (ii) comment utiliser cela pour consolider la trajectoire du train lors de mesures GPS bruitées.
Cas d'utilisation : Détection du point d'aiguillage
Dans des conditions optimales, le GPS fournit une localisation assez précise, en particulier dans les régions densément couvertes par des satellites. Le système utilise ces données pour calibrer la position du wagon d'inspection par rapport à un élément de référence dans l'infrastructure en validant et en mettant à jour les informations géographiques.
Dans les situations où le signal GPS est faible ou manquant, comme dans les tunnels ou les zones urbaines denses, le système peut s'appuyer sur l'odomètre pour la localisation. Cependant, certaines limitations peuvent empêcher une détection précise lorsque le wagon change de voie. Dans ces situations, la reconnaissance vidéo devient un outil puissant pour lever les ambiguïtés des mesures et obtenir une estimation robuste de la localisation du wagon.
Les caméras intégrées capturent en continu plusieurs images avec différentes vues sur le wagon. Il est ensuite possible d'utiliser des modèles d’apprentissage pour détecter les changements de voie du wagon lorsque des composants bien identifiés de l'infrastructure ferroviaire sont à proximité. Dans cet article, nous considérons la détection du berceau du cœur d'un appareil de voie.
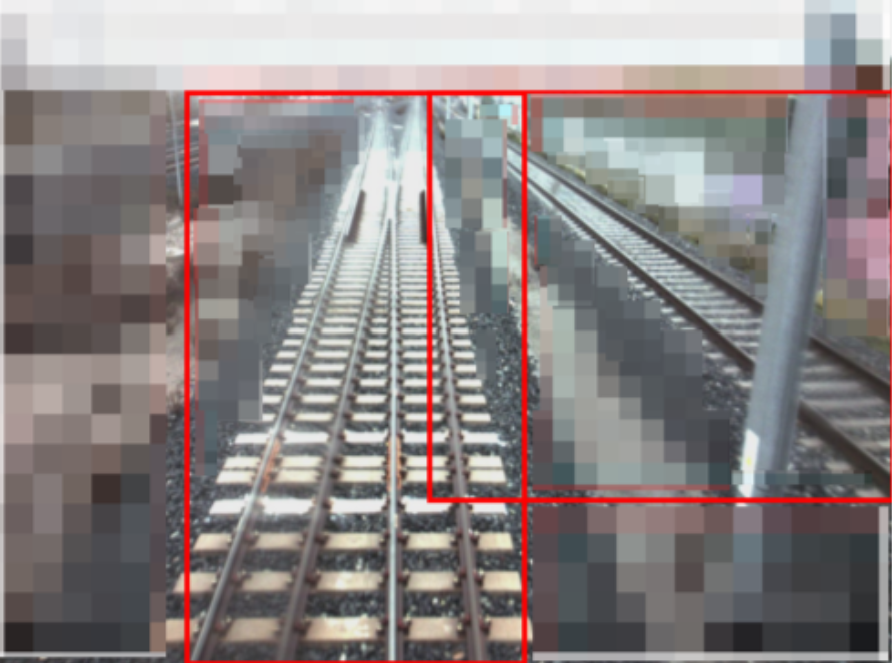
Comme le montre la Figure 2, nous abordons le problème de détection à partir d'images et à travers un pipeline de deux modules. Le premier module utilise un modèle état de l’art de segmentation d’images pré-entraîné. Son objectif principal est de détecter les régions de voie ferrée devant la caméra de tête du train et d'ignorer toutes les autres voies détectées, comme le montre la Figure 3.

Le deuxième module du pipeline applique un modèle de classification supervisée pour décider si le masque de segmentation produit par le premier module correspond au coeur de l'aiguillage.
La Figure 4 montre la sortie complète du pipeline. En se basant sur la position relative du train et du cœur détecté, il est facile de surveiller vers quelle voie se déplace le wagon.

Intégration d'experts dans la boucle
Les modèles d'apprentissage automatique peuvent bénéficier d'une collaboration active et de l'intégration de l'Humain-Dans-La-Boucle (HITL) dans la dynamique d'apprentissage afin d’assurer une amélioration continue dans les résultats prédictifs.
Impliquer les connaissances d'experts humains dans le processus d'apprentissage des systèmes intelligents pourrait être présenté à divers stades. Par exemple, la stratégie la plus courante consiste à construire une boucle de rétroaction où les retours d'experts sont collectés après l’entrainement du modèle pendant la phase de production. Ceci permet de créer un processus itératif qui aide à améliorer de manière continue la qualité des prédictions.
Un autre exemple de paradigme plus avancé est l'Apprentissage Actif (AL) où les modèles prédictifs sollicitent de manière interactive les experts pendant le processus d'apprentissage. La Figure 5 présente l'un des scénarios d’AL les plus courants où un grand ensemble d'échantillons non étiquetés est disponible pendant l’apprentissage du modèle. L'objectif est de sélectionner les points de données les plus informatifs et précieux pour l'étiquetage, ce qui réduit la quantité de données étiquetées nécessaires pour obtenir des performances prédictives élevées.

Nous attachons une grande importance à l'intégration de l'expertise humaine pour améliorer les performances globales, la robustesse, la fiabilité, l'explicabilité et la sécurité de nos modèles d'apprentissage automatique.
Cela s'inscrit dans le cadre des réglementations établies par l'Établissement Public de Sécurité Ferroviaire (EPSF), qui définit les conditions dans lesquelles les modèles d'apprentissage automatique peuvent être autorisés pour le déploiement dans les applications ferroviaires. En particulier, ces réglementations sont principalement concernées par le rôle de la rétroaction dans le maintien et l'amélioration du niveau de sécurité du système ferroviaire pour améliorer l'interprétabilité et l'explicabilité des modèles d'IA souvent considérés comme des boîtes noires. Cependant, cela soulève la question de la reproductibilité de tels modèles et du suivi de leur évolution.
Commentaires